

Autor: merakiki
Traducción: TechFlow
Durante décadas, el alcance de la robótica fue muy limitado, concentrándose principalmente en la ejecución de tareas repetitivas en entornos de fábricas estructuradas. Sin embargo, la inteligencia artificial (IA) actual está transformando radicalmente el campo de la robótica, permitiendo que los robots comprendan y ejecuten instrucciones de los usuarios, adaptándose a entornos dinámicos y cambiantes.
Estamos entrando en una nueva era de rápido crecimiento. Según Citibank, para 2035 se desplegarán 1.3 mil millones de robots en todo el mundo, expandiendo su aplicación desde fábricas hasta hogares y sectores de servicios. Al mismo tiempo, Morgan Stanley estima que solo el mercado de robots humanoides podría alcanzar un valor de 5 trillones de dólares para 2050.
A pesar de que esta expansión libera un enorme potencial de mercado, también conlleva importantes desafíos en centralización, confianza, privacidad y escalabilidad. Las tecnologías Web3, al habilitar redes de robots descentralizadas, verificables, que protegen la privacidad y fomentan la colaboración, ofrecen soluciones transformadoras para estos problemas.
En este artículo, profundizaremos en la cadena de valor en constante evolución de los robots de IA, con especial atención al campo de los robots humanoides, y revelaremos las atractivas oportunidades que surgen de la fusión entre robots de IA y tecnologías Web3.
Cadena de valor de los robots de IA
La cadena de valor de los robots de IA consta de cuatro capas fundamentales: hardware, inteligencia, datos y agentes. Cada capa se construye sobre las demás, permitiendo que los robots perciban, razonen y actúen en entornos complejos del mundo real.
En los últimos años, la capa de hardware ha logrado avances significativos liderados por pioneros de la industria como Unitree y Figure AI. Sin embargo, aún existen muchos desafíos clave en las capas no relacionadas con hardware, especialmente la escasez de conjuntos de datos de alta calidad, la falta de modelos base generales, la baja compatibilidad entre dispositivos y la necesidad de computación en el borde confiable. Por lo tanto, las mayores oportunidades de desarrollo actualmente se encuentran en las capas de inteligencia, datos y agentes.
1.1 Capa de hardware: “El cuerpo”
Hoy en día, la fabricación y el despliegue de “cuerpos robóticos” modernos es más fácil que nunca. Actualmente existen más de 100 tipos diferentes de robots humanoides en el mercado, incluyendo Optimus de Tesla, G1 de Unitree, Digit de Agility Robotics y Figure 02 de Figure AI.
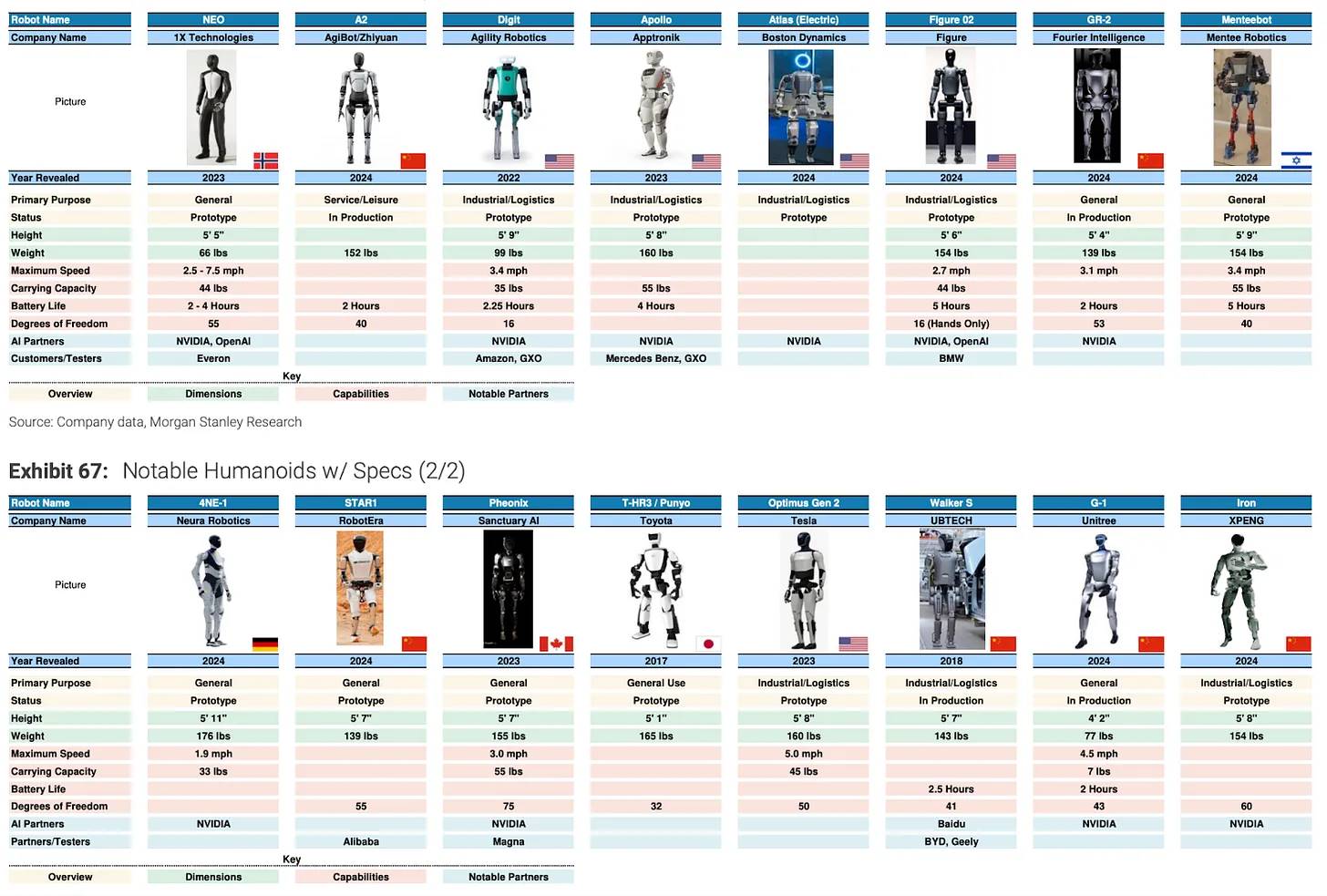
Fuente: Morgan Stanley, “Humanoid Robots 100: Mapa de la cadena de valor de los robots humanoides”
Este avance es posible gracias a los siguientes tres componentes clave:
-
Actuadores: Funcionan como los “músculos” del robot, convirtiendo instrucciones digitales en movimientos precisos. Las innovaciones en motores de alto rendimiento permiten a los robots realizar movimientos rápidos y precisos, mientras que los actuadores dieléctricos elastoméricos (DEAs) son adecuados para tareas delicadas. Estas tecnologías han mejorado significativamente la flexibilidad de los robots, por ejemplo, Optimus Gen 2 de Tesla cuenta con 22 grados de libertad (DoF), al igual que el G1 de Unitree, ambos mostrando una flexibilidad cercana a la humana y una impresionante capacidad de movimiento.
Fuente: Unitree mostrando su último robot humanoide en una pelea de boxeo en la WAIC 2025
-
Sensores: Sensores avanzados permiten a los robots percibir e interpretar el entorno a través de entradas visuales, LIDAR/RADAR, táctiles y de audio. Estas tecnologías permiten la navegación segura, la manipulación precisa y la percepción contextual.
-
Computación embebida: CPUs, GPUs y aceleradores de IA (como TPU y NPU) en el dispositivo procesan datos de sensores y ejecutan modelos de IA en tiempo real, permitiendo la toma de decisiones autónoma. La conectividad confiable y de baja latencia asegura la coordinación sin fisuras, mientras que las arquitecturas híbridas edge-cloud permiten a los robots descargar tareas de computación intensiva cuando es necesario.
1.2 Capa de inteligencia: “El cerebro”
A medida que el hardware madura, la atención de la industria se centra en construir el “cerebro robótico”: modelos base potentes y estrategias de control avanzadas.
Antes de la integración de la IA, los robots dependían de automatización basada en reglas, ejecutando acciones preprogramadas sin inteligencia adaptativa.
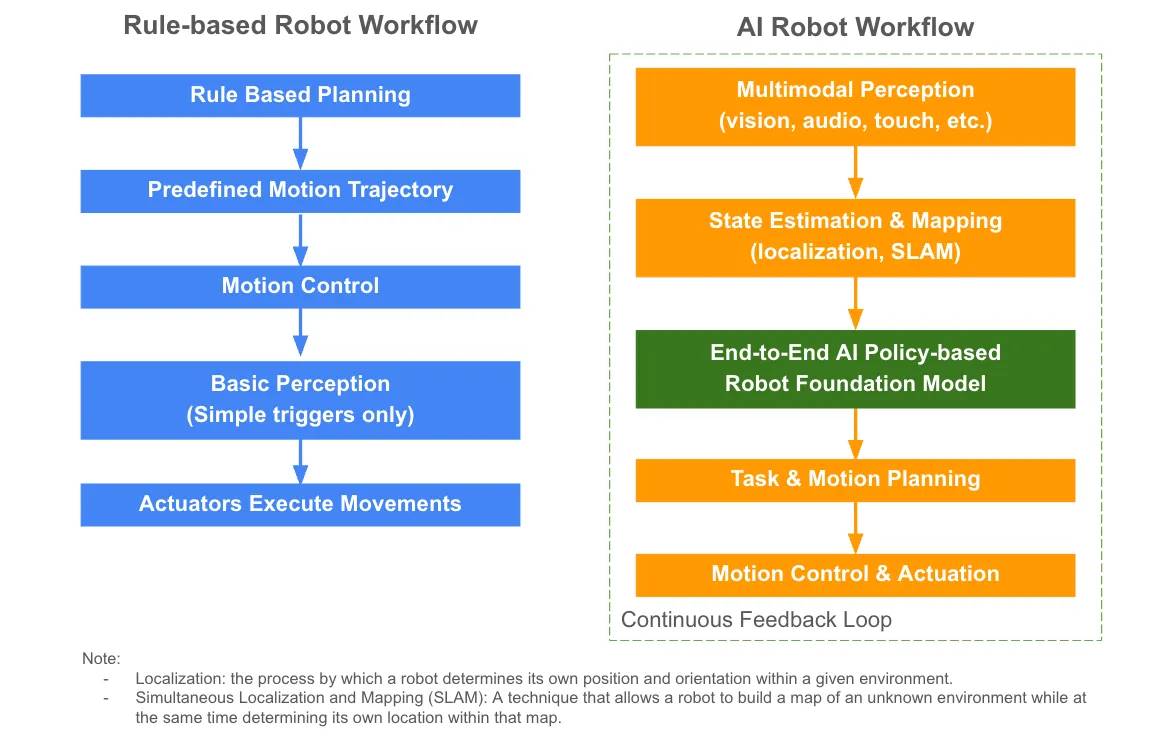
Los modelos base se están aplicando gradualmente en el campo de la robótica. Sin embargo, los grandes modelos de lenguaje (LLMs) generales no son suficientes, ya que los robots necesitan percibir, razonar y actuar en entornos físicos dinámicos. Para satisfacer estas necesidades, la industria está desarrollando modelos base de robótica de extremo a extremo basados en políticas. Estos modelos permiten a los robots:
-
Percibir: Recibir datos multimodales de sensores (visión, audio, tacto)
-
Planificar: Estimar su propio estado, mapear el entorno e interpretar instrucciones complejas, mapeando la percepción directamente a la acción y reduciendo la intervención de ingeniería manual
-
Actuar: Generar planes de movimiento y emitir comandos de control para la ejecución en tiempo real
Estos modelos aprenden “políticas” generales de interacción con el mundo, permitiendo a los robots adaptarse a diversas tareas y operar con mayor inteligencia y autonomía. Los modelos avanzados también utilizan retroalimentación continua, permitiendo que los robots aprendan de la experiencia y mejoren aún más su adaptabilidad en entornos dinámicos.
El modelo VLA mapea directamente las entradas sensoriales (principalmente datos visuales e instrucciones en lenguaje natural) a acciones robóticas, permitiendo que los robots emitan comandos de control apropiados según lo que “ven” y “oyen”. Ejemplos notables incluyen RT-2 de Google, Isaac GR00T N1 de Nvidia y π0 de Physical Intelligence.
Para mejorar estos modelos, a menudo se integran varios métodos complementarios, como:
-
Modelos del mundo: Construyen simulaciones internas del entorno físico, ayudando a los robots a aprender comportamientos complejos, predecir resultados y planificar acciones. Por ejemplo, Genie 3 de Google es un modelo del mundo general capaz de generar entornos interactivos diversos y sin precedentes.
-
Aprendizaje profundo por refuerzo: Ayuda a los robots a aprender comportamientos mediante prueba y error.
-
Teleoperación: Permite el control remoto y proporciona datos de entrenamiento.
-
Aprendizaje por demostración (LfD)/Aprendizaje por imitación: Enseña nuevas habilidades a los robots imitando acciones humanas.
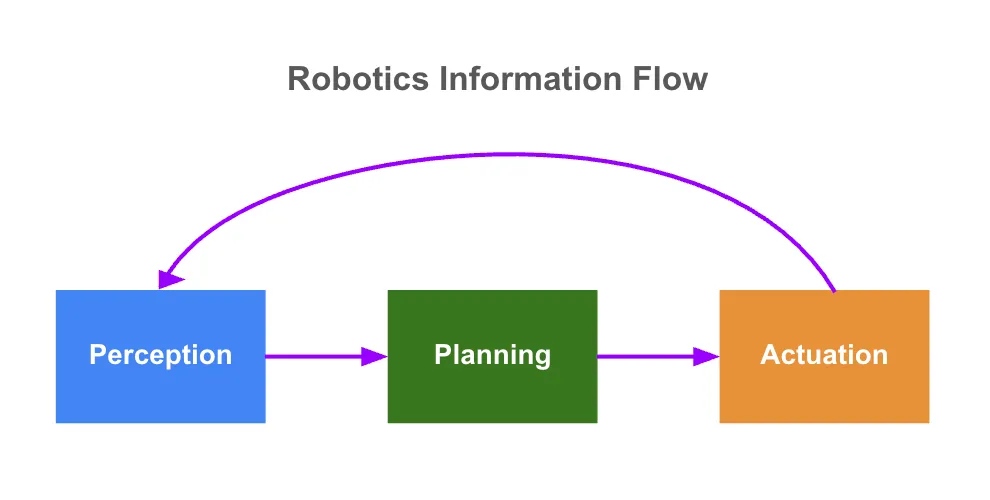
La siguiente imagen muestra cómo estos métodos funcionan en los modelos base de robótica.
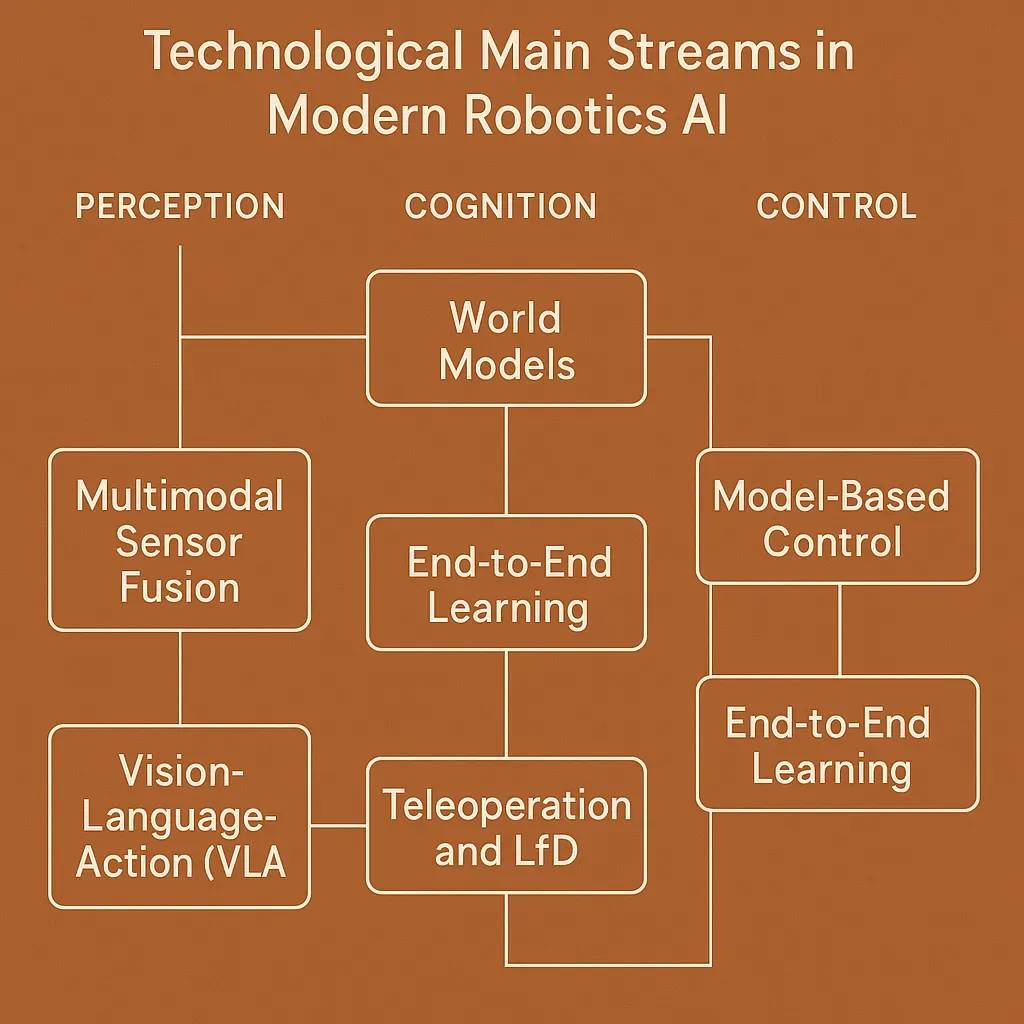
Fuente: Modelos del mundo: el núcleo de inteligencia física que impulsa el avance hacia la AGI (World models: the physical intelligence core driving us toward AGI)
Algunos avances recientes de código abierto, como π0 de Physical Intelligence y Isaac GR00T N1 de Nvidia, marcan un progreso importante en el campo. Sin embargo, la mayoría de los modelos base de robótica siguen siendo centralizados y de código cerrado. Empresas como Covariant y Tesla aún mantienen código y conjuntos de datos propietarios, principalmente por la falta de mecanismos de incentivos abiertos.
Esta falta de transparencia limita la colaboración y la interoperabilidad entre plataformas robóticas, destacando la necesidad de estándares on-chain para el intercambio seguro y transparente de modelos, gobernanza comunitaria y capas de interoperabilidad entre dispositivos. Este enfoque fomentará la confianza, la cooperación y el desarrollo más sólido del sector.
1.3 Capa de datos: “El conocimiento del cerebro”
Los conjuntos de datos robustos para robótica dependen de tres pilares: cantidad, calidad y diversidad.
Aunque la industria ha hecho esfuerzos para acumular datos, la escala de los conjuntos de datos robóticos existentes sigue siendo insuficiente. Por ejemplo, GPT-3 de OpenAI fue entrenado con 300 mil millones de tokens, mientras que el mayor conjunto de datos robóticos de código abierto, Open X-Embodiment, solo contiene más de 1 millón de trayectorias robóticas reales, cubriendo 22 tipos de robots. Esto está muy lejos de la escala de datos necesaria para lograr una gran capacidad de generalización.
Algunos métodos propietarios, como la recolección de datos de Tesla a través de fábricas de datos y el uso de trajes de captura de movimiento por parte de empleados para generar datos de entrenamiento, ayudan a recolectar más datos de movimiento reales. Sin embargo, estos métodos son costosos, tienen una diversidad de datos limitada y son difíciles de escalar.
Para abordar estos desafíos, el campo de la robótica está aprovechando tres fuentes principales de datos:
-
Datos de Internet: Los datos de Internet son masivos y fáciles de escalar, pero principalmente son datos observacionales y carecen de señales de sensores y movimiento. El preentrenamiento de grandes modelos de visión y lenguaje (como GPT-4V y Gemini) en datos de Internet puede proporcionar valiosos conocimientos semánticos y visuales. Además, agregar etiquetas cinemáticas a videos puede convertir videos crudos en datos de entrenamiento utilizables.
-
Datos sintéticos: Los datos sintéticos generados por simulación permiten experimentos a gran escala y cubren escenarios diversos rápidamente, pero no pueden reflejar completamente la complejidad del mundo real, una limitación conocida como la “brecha de simulación a realidad” (sim-to-real gap). Los investigadores abordan esto mediante adaptación de dominio (como aumento de datos, aleatorización de dominio, aprendizaje adversarial) y transferencia de simulación a realidad, optimizando modelos iterativamente y ajustándolos en entornos reales.
-
Datos del mundo real: Aunque escasos y costosos, los datos del mundo real son esenciales para la implementación de modelos y para cerrar la brecha entre la simulación y el despliegue real. Los datos reales de alta calidad suelen incluir vistas egocéntricas, registrando lo que el robot “ve” durante las tareas, y datos de movimiento que documentan acciones precisas. Estos datos de movimiento suelen recopilarse mediante demostraciones humanas o teleoperación, utilizando realidad virtual (VR), dispositivos de captura de movimiento o enseñanza táctil, asegurando que los modelos aprendan de ejemplos reales y precisos.
Las investigaciones muestran que entrenar robots combinando datos de Internet, del mundo real y sintéticos mejora significativamente la eficiencia de entrenamiento y la robustez del modelo, en comparación con depender de una sola fuente de datos (nota de TechFlow: robustez se refiere a la capacidad del sistema para mantenerse fuerte y estable ante situaciones anómalas o peligrosas).
Mientras tanto, aunque aumentar la cantidad de datos ayuda, la diversidad de los datos es aún más importante, especialmente para lograr la generalización a nuevas tareas y morfologías robóticas. Para lograr esta diversidad, se necesitan plataformas de datos abiertas y compartición colaborativa de datos, incluyendo la creación de conjuntos de datos multi-instancia que soporten diversas morfologías robóticas, impulsando así el desarrollo de modelos base más potentes.
1.4 Capa de agentes: “Agentes físicos de IA”
La tendencia hacia agentes físicos de IA está acelerándose, con robots autónomos capaces de actuar de forma independiente en el mundo real. El progreso en la capa de agentes depende del ajuste fino de modelos, el aprendizaje continuo y la adaptación práctica a la morfología única de cada robot.
A continuación, algunas oportunidades emergentes para acelerar el desarrollo de agentes físicos de IA:
-
Aprendizaje continuo e infraestructura adaptativa: Mediante bucles de retroalimentación en tiempo real y el intercambio de experiencias durante el despliegue, los robots pueden mejorar continuamente.
-
Economía de agentes autónomos: Los robots operan como entidades económicas independientes, comerciando recursos como capacidad de cómputo y datos de sensores en mercados entre robots, y generando ingresos a través de servicios tokenizados.
-
Sistemas multiagente: Plataformas y algoritmos de próxima generación permiten que grupos de robots coordinen, colaboren y optimicen comportamientos colectivos.
Fusión de robots de IA y Web3: liberando un enorme potencial de mercado
A medida que los robots de IA pasan de la investigación al despliegue en el mundo real, varios cuellos de botella de larga data están obstaculizando la innovación y limitando la escalabilidad, robustez y viabilidad económica del ecosistema robótico. Estos cuellos de botella incluyen islas centralizadas de datos y modelos, falta de confianza y trazabilidad, restricciones de privacidad y cumplimiento, y falta de interoperabilidad.
2.1 Puntos críticos que enfrentan los robots de IA
-
Islas centralizadas de datos y modelos
Los modelos robóticos requieren conjuntos de datos grandes y diversos. Sin embargo, los datos y el desarrollo de modelos actuales están altamente centralizados, fragmentados y son costosos, lo que conduce a sistemas aislados y con baja adaptabilidad. Los robots desplegados en entornos dinámicos del mundo real a menudo tienen un rendimiento deficiente debido a la falta de diversidad de datos y la limitada robustez de los modelos.
-
Confianza, trazabilidad y fiabilidad
La falta de registros transparentes y auditables (incluyendo fuentes de datos, procesos de entrenamiento de modelos e historial de operaciones de robots) debilita la confianza y la responsabilidad. Esto es un obstáculo importante para la adopción de robots por parte de usuarios, reguladores y empresas.
-
Privacidad, seguridad y cumplimiento
En aplicaciones sensibles como la robótica médica y doméstica, la protección de la privacidad es fundamental y debe cumplir con regulaciones regionales estrictas (como el Reglamento General de Protección de Datos (GDPR) de Europa). Las infraestructuras centralizadas tienen dificultades para soportar la colaboración de IA segura y que proteja la privacidad, limitando el intercambio de datos e inhibiendo la innovación en sectores regulados o sensibles.
-
Escalabilidad e interoperabilidad
Los sistemas robóticos enfrentan grandes desafíos en el intercambio de recursos, el aprendizaje colaborativo y la integración entre múltiples plataformas y morfologías. Estas limitaciones fragmentan los efectos de red y dificultan la transferencia rápida de capacidades entre diferentes tipos de robots.
2.2 Robots de IA x Web3: soluciones estructurales impulsan oportunidades de inversión
Las tecnologías Web3 resuelven fundamentalmente los puntos críticos anteriores mediante redes de robots descentralizadas, verificables, que protegen la privacidad y fomentan la colaboración. Esta fusión está abriendo nuevas oportunidades de mercado para la inversión:
-
Desarrollo colaborativo descentralizado: A través de redes impulsadas por incentivos, los robots pueden compartir datos y desarrollar conjuntamente modelos y agentes inteligentes.
-
Trazabilidad y responsabilidad verificables: La tecnología blockchain garantiza registros inmutables de la procedencia de datos y modelos, la identidad robótica y el historial de operaciones, lo cual es crucial para la confianza y el cumplimiento.
-
Colaboración que protege la privacidad: Soluciones criptográficas avanzadas permiten que los robots entrenen modelos y compartan conocimientos sin exponer datos propietarios o sensibles.
-
Gobernanza impulsada por la comunidad: Las organizaciones autónomas descentralizadas (DAOs) guían y supervisan las operaciones robóticas mediante reglas y políticas transparentes e inclusivas on-chain.
-
Interoperabilidad entre morfologías: Los marcos abiertos basados en blockchain facilitan la colaboración fluida entre diferentes plataformas robóticas, reduciendo costos de desarrollo y acelerando la transferencia de capacidades.
-
Economía de agentes autónomos: La infraestructura Web3 otorga a los robots identidad económica independiente, permitiéndoles realizar transacciones peer-to-peer, negociar y participar en mercados tokenizados sin intervención humana.
-
Redes de infraestructura física descentralizada (DePIN): Compartición de recursos de cómputo, percepción, almacenamiento y conectividad peer-to-peer basada en blockchain, mejorando la escalabilidad y resiliencia de las redes robóticas.
A continuación, algunos proyectos innovadores que están impulsando el desarrollo en este campo, mostrando el potencial y las tendencias de la fusión entre robots de IA y Web3. Por supuesto, esto es solo para referencia y no constituye un consejo de inversión.
Desarrollo descentralizado de datos y modelos
Las plataformas impulsadas por Web3 democratizan el desarrollo de datos y modelos incentivando a los contribuyentes (como trajes de captura de movimiento, compartición de sensores, carga de imágenes, etiquetado de datos e incluso generación de datos sintéticos). Este enfoque permite construir conjuntos de datos y modelos más ricos, diversos y representativos, superando lo que cualquier empresa individual podría lograr. Los marcos descentralizados también mejoran la cobertura de casos límite, lo cual es esencial para robots que operan en entornos impredecibles.
Ejemplos:
-
Frodobots: Protocolo de crowdsourcing de conjuntos de datos del mundo real a través de juegos robóticos. Lanzaron el proyecto “Earth Rovers”, un robot de acera y juego global “Drive to Earn”, creando exitosamente el conjunto de datos FrodoBots 2K, que incluye imágenes de cámara, datos GPS, grabaciones de audio y datos de control humano, cubriendo más de 10 ciudades y acumulando unas 2000 horas de conducción remota de robots.
-
BitRobot: Plataforma incentivada cripto desarrollada conjuntamente por FrodoBots Lab y Protocol Labs, basada en la blockchain Solana y arquitectura de subredes. Cada subred se establece como un desafío público, y los contribuyentes obtienen recompensas en tokens al enviar modelos o datos, incentivando la colaboración global y la innovación open source.
-
Reborn Network: Capa base para el ecosistema abierto de robots AGI, que ofrece el traje de captura de movimiento Rebocap, permitiendo a cualquiera registrar y monetizar sus propios datos de movimiento reales, promoviendo la apertura de conjuntos de datos complejos de robots humanoides.
-
PrismaX: Aprovecha la fuerza de los contribuyentes de la comunidad global, asegurando la diversidad y autenticidad de los datos mediante infraestructura descentralizada, implementando mecanismos sólidos de verificación e incentivos para escalar conjuntos de datos robóticos.
Prueba de trazabilidad y fiabilidad
La tecnología blockchain proporciona transparencia de extremo a extremo y atribución de responsabilidad en el ecosistema robótico. Garantiza la trazabilidad verificable de datos y modelos, certifica la identidad y ubicación física de los robots, y mantiene registros claros de operaciones e implicación de los contribuyentes. Además, la verificación colaborativa, los sistemas de reputación on-chain y los mecanismos de validación basados en participación aseguran la calidad de datos y modelos, evitando que entradas de baja calidad o fraudulentas dañen el ecosistema.
Ejemplo:
-
OpenLedger: Infraestructura blockchain de IA que utiliza conjuntos de datos propiedad de la comunidad para entrenar y desplegar modelos especializados. Su mecanismo “Proof of Attribution” garantiza que los contribuyentes de datos de alta calidad reciban recompensas justas.
Propiedad, licenciamiento y monetización tokenizados
Las herramientas nativas de propiedad intelectual de Web3 permiten la tokenización y licenciamiento de conjuntos de datos, capacidades robóticas, modelos y agentes inteligentes especializados. Los contribuyentes pueden usar contratos inteligentes para incrustar términos de licencia directamente en sus activos, asegurando pagos automáticos de regalías cuando los datos o modelos se reutilizan o monetizan. Este enfoque fomenta el acceso transparente y sin permisos, y crea un mercado abierto y justo para datos y modelos robóticos.
Ejemplo:
-
Poseidon: Capa de datos descentralizada full-stack basada en el protocolo Story centrado en IP, que proporciona datos de entrenamiento de IA con autorización legal.
Soluciones de protección de la privacidad
Los datos de alto valor generados en hospitales, habitaciones de hotel o hogares, aunque difíciles de obtener por canales públicos, contienen información contextual rica que puede mejorar significativamente el rendimiento de los modelos base. Las soluciones criptográficas permiten convertir datos privados en activos on-chain, haciéndolos rastreables, componibles y monetizables, mientras se protege la privacidad. Tecnologías como entornos de ejecución confiables (TEEs) y pruebas de conocimiento cero (ZKPs) permiten cálculos seguros y verificación de resultados sin exponer los datos originales. Estas herramientas permiten a las organizaciones entrenar modelos de IA en datos sensibles distribuidos, manteniendo la privacidad y el cumplimiento.
Ejemplo:
-
Phala Network: Permite a los desarrolladores desplegar aplicaciones en TEEs seguros para IA confidencial y procesamiento de datos.
Gobernanza abierta y auditable
El entrenamiento de robots suele depender de sistemas propietarios de caja negra que carecen de transparencia y adaptabilidad. La gobernanza transparente y verificable es esencial para reducir riesgos y aumentar la confianza de usuarios, reguladores y empresas. Las tecnologías Web3 permiten el desarrollo colaborativo de inteligencia robótica open source mediante supervisión comunitaria on-chain.
Ejemplo:
-
Openmind: Pila de software nativa de IA abierta que ayuda a los robots a pensar, aprender y colaborar. Han propuesto el estándar ERC7777 para establecer un ecosistema robótico regulado y verificable, enfocado en seguridad, transparencia y escalabilidad. Este estándar define interfaces estandarizadas para gestionar identidades humanas y robóticas, ejecutar conjuntos de reglas sociales y registrar o eliminar participantes, aclarando derechos y responsabilidades.
Reflexiones finales
A medida que la IA robótica y las tecnologías Web3 se fusionan, estamos entrando en una nueva era en la que los sistemas autónomos pueden lograr colaboración y adaptación a gran escala. Los próximos 3 a 5 años serán cruciales, con el rápido desarrollo del hardware impulsando el surgimiento de modelos de IA más potentes, basados en conjuntos de datos del mundo real más ricos y mecanismos de colaboración descentralizada. Se espera que agentes de IA especializados destaquen en industrias como la hotelería y la logística, creando enormes nuevas oportunidades de mercado.
Sin embargo, esta fusión de IA robótica y tecnología cripto también presenta desafíos. El diseño de mecanismos de incentivos equilibrados y efectivos sigue siendo complejo y está en constante evolución; los sistemas deben recompensar equitativamente a los contribuyentes y evitar abusos. La complejidad técnica es otro gran reto, requiriendo el desarrollo de soluciones robustas y escalables para lograr la integración fluida de múltiples tipos de robots. Además, las tecnologías de protección de la privacidad deben ser lo suficientemente confiables para ganar la confianza de los interesados, especialmente al tratar datos sensibles. El entorno regulatorio en rápida evolución también exige un enfoque cauteloso para garantizar el cumplimiento en diferentes jurisdicciones. Abordar estos riesgos y lograr retornos sostenibles es clave para impulsar el progreso tecnológico y la adopción generalizada.
Sigamos de cerca el desarrollo de este campo, promoviendo el progreso a través de la colaboración y aprovechando las oportunidades que surgen en este mercado en rápida expansión.
La innovación en robótica es un viaje que se disfruta mejor en compañía :)
Por último, quiero agradecer a Chain of Thought y su “Robotics & The Age of Physical AI” por el valioso apoyo a mi investigación.

